|
|
|
|
|
 |
 |
 |
 |
Der Einsatz eines Magnetkompasses und eines Autopiloten auf einem im Kanal fahrenden Sportboot kann durch verschiedene Störquellen erheblich beeinträchtigt werden. Besonders problematisch sind stählerne Spundwände, die entlang vieler Kanäle verbaut sind. Diese erzeugen lokale Magnetfelder, die den Kompass beeinflussen und zu Fehlsteuerungen führen können. Ähnliche Störungen treten in der Nähe von Brücken, Kränen oder anderen stählernen Wasserbauten auf, deren metallische Strukturen das Erdmagnetfeld verzerren.
Die Situation wird noch komplexer, wenn es sich um ein Stahlboot handelt. Der eigene Rumpf kann das Magnetfeld verfälschen und macht eine präzise Kalibrierung des Kompasses schwierig. Ein weiteres Problem entsteht, wenn das Boot über längere Zeit in der gleichen Richtung liegt, beispielsweise in einem Hafen oder an einer Spundwand. In diesem Fall kann es sich aufmagnetisieren, wodurch sich der Fehler im Kompass verstärkt. Eine erneute Kalibrierung wird dann notwendig, um eine zuverlässige Steuerung durch den Autopiloten zu gewährleisten.
GPS und die Grenzen für den Autopiloten
GPS-Navigation ist heute der Standard für die Positionsbestimmung – sei es in der Luftfahrt, der Schifffahrt, im Auto oder sogar bei jeder Fahrradtour. Selbst in unseren Smartphones zeichnet das System beim Gang zum Bäcker unsere Spur auf und kann dabei auch relativ präzise die Bewegungsrichtung bestimmen.
Allerdings gibt es eine wesentliche Einschränkung: Sobald die Bewegung stoppt oder die Geschwindigkeit sehr gering ist, wird der ermittelte Bewegungswinkel unzuverlässig. Dieser Winkel wird als Kurs über Grund (COG – Course Over Ground) bezeichnet. Da GPS die Richtung aus aufeinanderfolgenden Positionsänderungen berechnet, führt eine geringe Geschwindigkeit zu großen Schwankungen in der Kursbestimmung. Und im Stillstand ist die Ausrichtung des GPS-Empfängers völlig unbestimmt. Für die Steuerung eines Autopiloten ist das nicht ausreichend.
Was ist GNSS-RTK?
GNSS steht für Global Navigation Satellite System. Das amerikanische GPS, das russische GLONAS und das europäische GALILEO sind Beispiele. RTK bedeutet Real-Time-Kinematic. Hierbei wird die Positionsgenauigkeit von GNSS extrem verbessert. Es werden die Satellitensignale von zwei (oder mehr) Antennen an unterschiedlichen Orten gemeinsam ausgewertet. Durch die Bestimmung der Phasendifferenz zwischen diesen Signalen wird u.a. auch die Ausrichtung der Basislinie zwischen den Antennen berechenbar. Damit lässt sich schließlich ein präziser Kompass realisieren, der die Ausrichtung eines Fahrzeugs relativ zu True-North (geographisch Nord oder rechtweisend Nord) bestimmt.
Was kostet ein GNSS-Kompass?
Seit mehr als 20 Jahren sind sogenannte GNSS-Kompasse für den maritimen Einsatz verfügbar. Anfänglich kosteten diese Systeme einige tausend Euro. Damit war deren Einsatz auf die professionelle Schifffahrt beschränkt. Aber seit einigen Jahren sind günstigere Systeme auch für das Sportboot verfügbar. Deren Preise liegen heute im Bereich von 1000-2000 Euro, wie die folgende Tabelle anhand einiger Beispiele zeigt.
|
|
|
|
|
|
|
|
|
|
Geht es noch günstiger?
Eindeutig: Ja, es geht! Voraussetzung: ein wenig Erfahrung mit der Programmierung von Microcontrollern (Arduino, ESP8266, ESP-12). Und natürlich sollte auch der Umgang mit dem Lötkolben halbwegs vertraut sein.
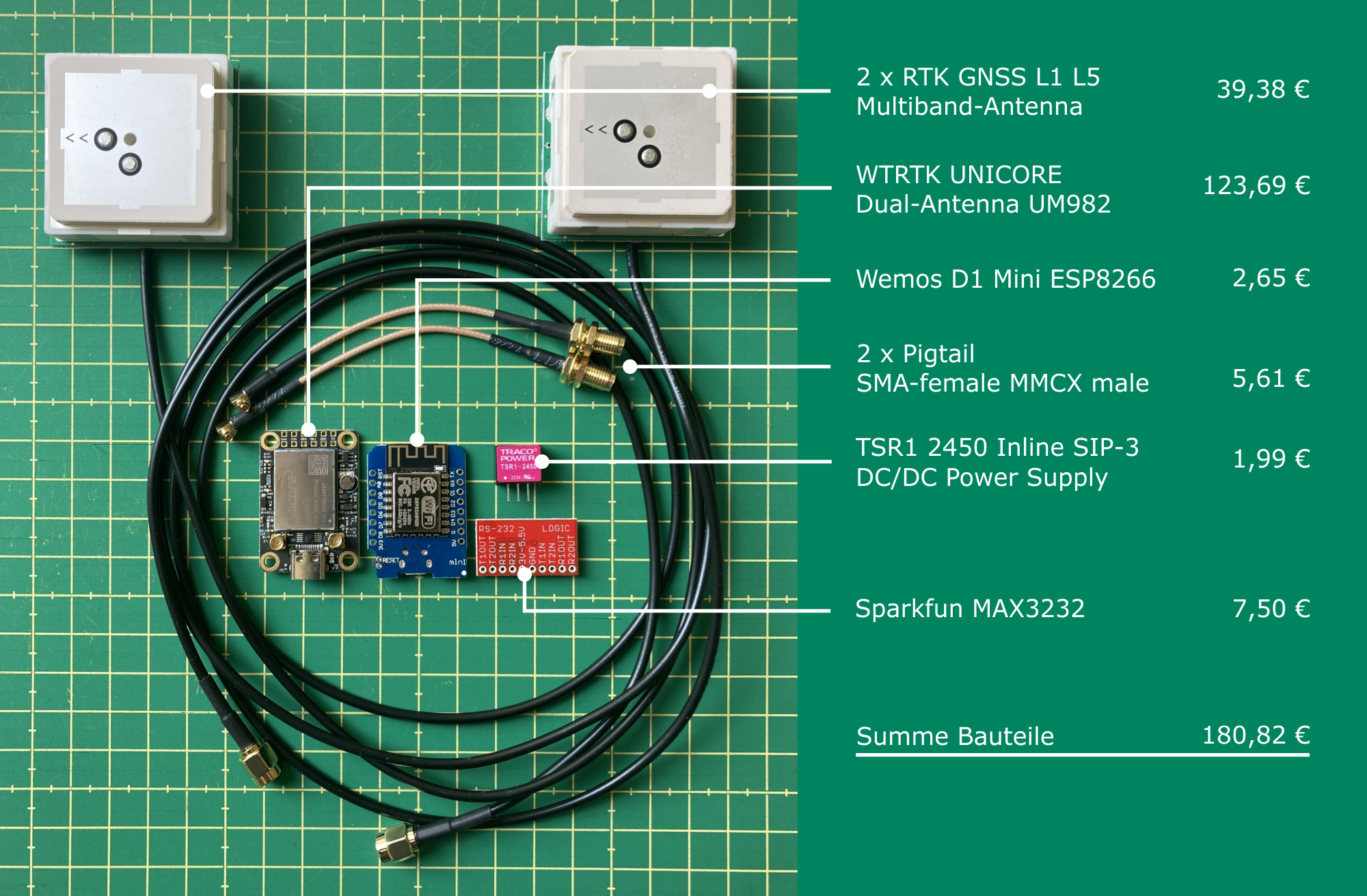
Kurz gesagt: Per "Do it yourself" lässt sich ein moderner GNSS-Kompass mit RTK-Phasentracking mit einem Budget von weniger als 500 Euro realisieren. Kernkomponente sind dabei GNSS-Empfänger in System-on-Chip (SOC) Technologie. Diese Systeme gibt es nicht nur als einfache GPS-Chips für 50 - 100 Euro, sondern inzwischen auch mit RTK-Technologie und seit kurzem auch mit Dual-Antennen Eingang, also zur Messung der Kurwinkels zwischen zwei Antennen. Das Anwendungfeld dieser SOC Empfänger reicht von Drohnen über Roboterfahrzeuge, sowie selbsteuernde Automobile und Traktoren. Im folgenden zwei dieser kostengünstigen Entwicklerboards, die sich als Kernkomponente für einen DIY-Kompass eignen.
|
|
|
|
|
|
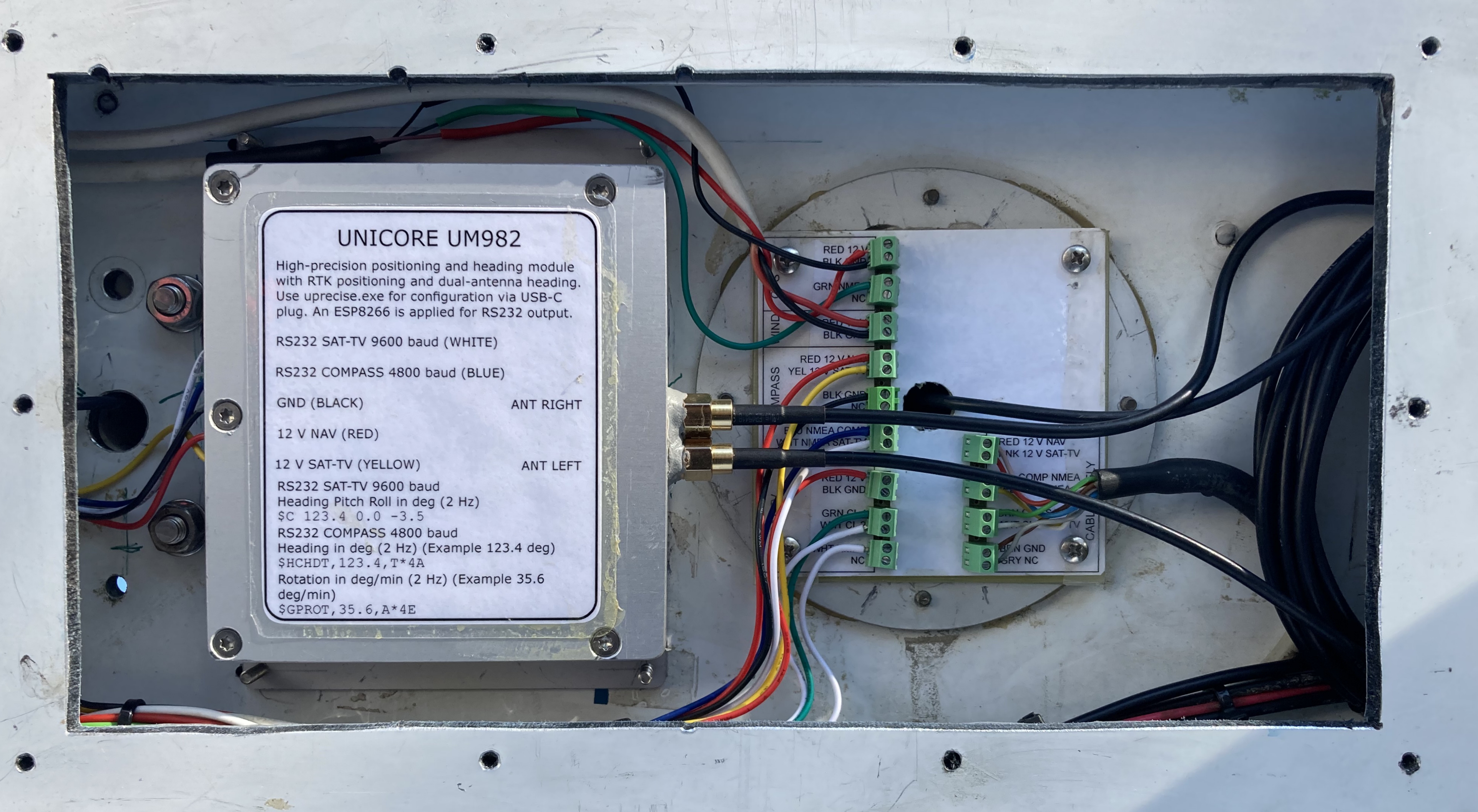
Beide Platinen verwenden den UM982 genannten SOC-Chip der chinesischen Firma UniCore. Mit einer Größe von 16.0 × 21.0 × 2.6 mm enthält dieser Chip alles, was es braucht, um die komplexe mathematische anspruchsvolle Phasenauswertung der Trägersignale zu bewerkstelligen. Zur Konfiguration der Systems gibt es von Unicore das Windows-Programm uprecise.exe, welches als Download erhältlich ist. Mit uprecise wird das Verhalten des UM982 konfiguriert.
Eine vollständige Beschreibung der Konfiguration des UM982 ist diesem Dokument zu entnehmen.
Für den GNSS-Kompass braucht es mindestens die folgenden Eingaben:
| FRESET | alle Einstellungen zurücksetzen |
| CONFIG COM2 19200 | Baudrate COM2 19200 Baud |
| CONFIG HEADING LENGTH 100 | Abstand von ANT1 zu ANT2 100 cm |
| CONFIG HEADING OFFSET -90 | Heading-Offset -90 Grad, bei der Montage wie im folgenden Bild darstellt |
| GPHPR COM2 0.1 | heading, pitch, roll mit 10 Hz senden |
| GPROT COM2 0.1 | rotation mit 10 Hz senden |
| CONFIG | Einstellungen zur Konrolle ausgeben |
| SAVECONFIG | Einstellungen im Flash-Memory speichern |
Damit sendet das UM982 alle 100 ms die folgenden Daten über die COM2 Schnittstelle:
| $GNHPR,44.5,1.5,0.0,5,8...*cs<cr><lf> | ||
| heading | 44.5 deg (0...360) | |
| pitch | 1.5 deg (-90...90) | |
| roll | 0.0 deg (-90...90) | |
| quality | 5 (valid, if quality = 5) | |
| sat-cnt | 8 satellites | |
| cs | checksum | |
| <cr><lf> | terminator | |
| $GNROT,0.0,V*cs<cr><lf> | ||
| rotation | 0.0 deg/min | |
| status | V (valid, if status=V) | |
| cs | checksum | |
| <cr><lf> | terminator | |
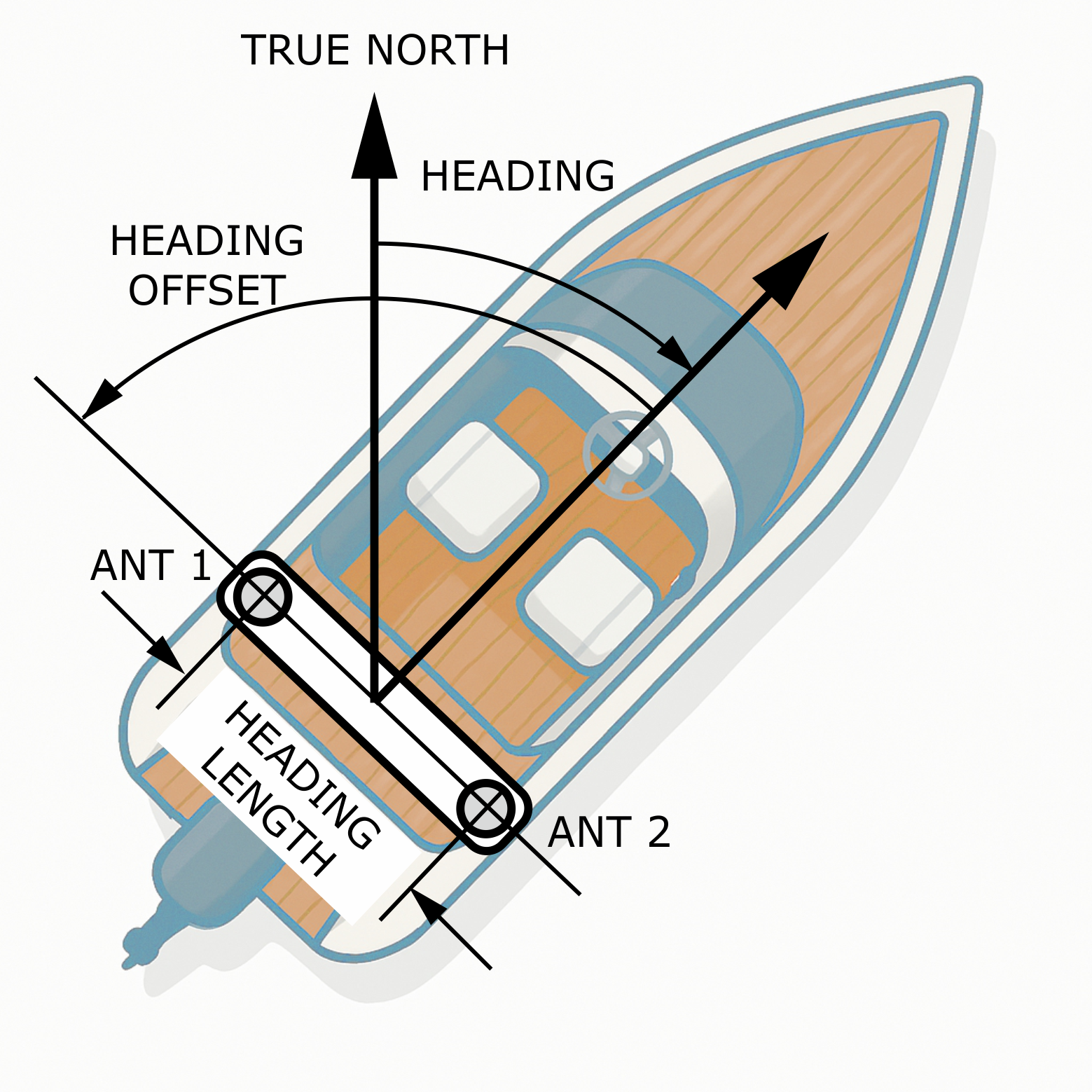
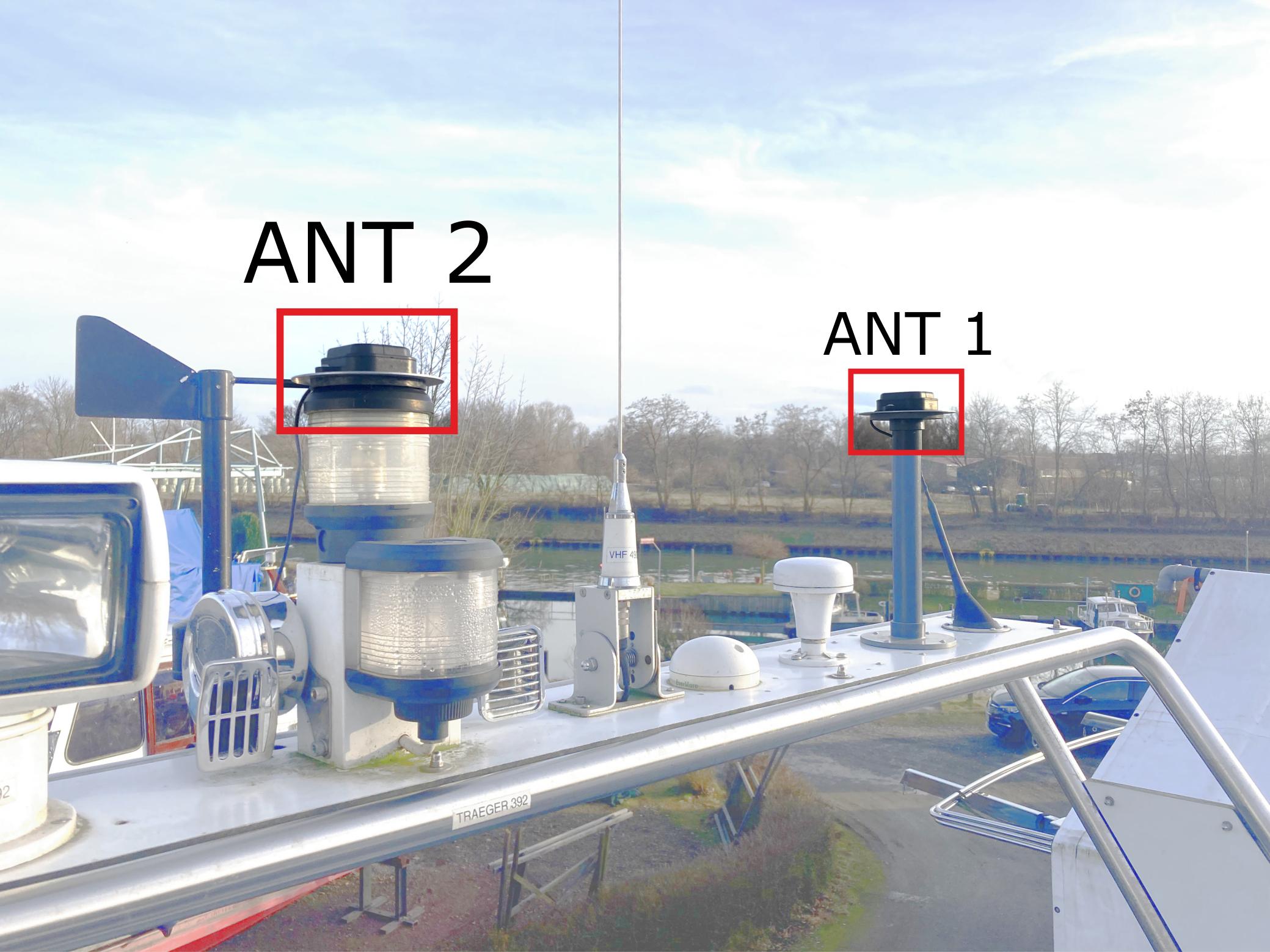
Im Bild oben ist die mögliche Anordnung der GNSS-Antennen (ANT 1, ANT 2) auf dem Sportboot dargestellt. Je größer deren Abstand von einander ist, umso kleiner wird der Messfehler. Daumenregel: 0,1 Grad bei 1 m Abstand. In diesem Beispiel: Heading = 45 Grad, Heading-Offset = -90 Grad.
 |
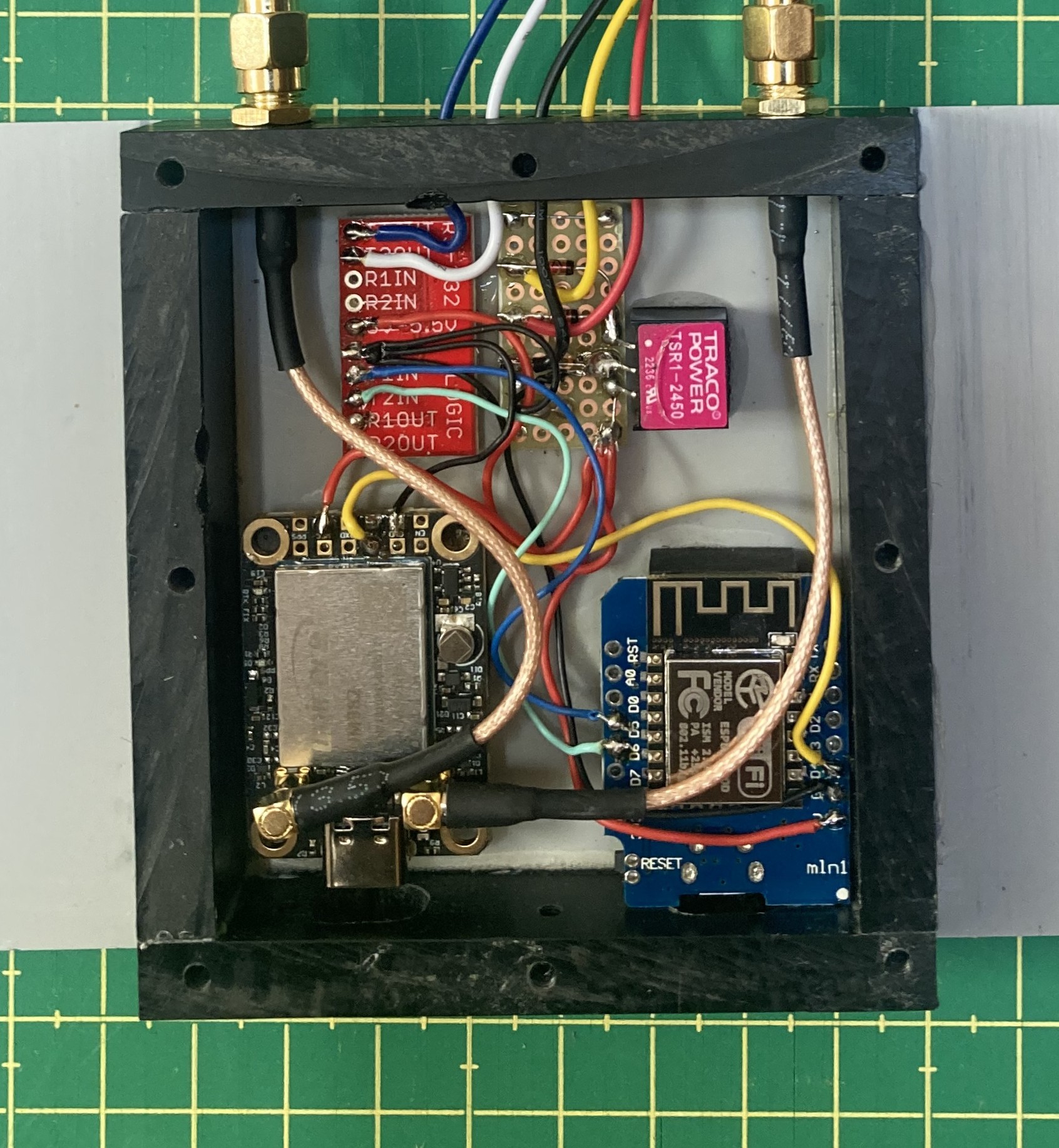 |
GNSS-Kompass mit dem WTRTK-982 Board, einer Breitband-Stromversorgung als DC/DC-Konverter (TRACO POWER TSR 1 2450), einem ESP-8266 Micro-Controller (Wemos D1 mini) und einem Pegelwandler (MAX3232) zur Anpassung der TTL-Ausgangssignale (0 ... 3.3 V) an den RS-232-Standard (-12 ... +12 V).
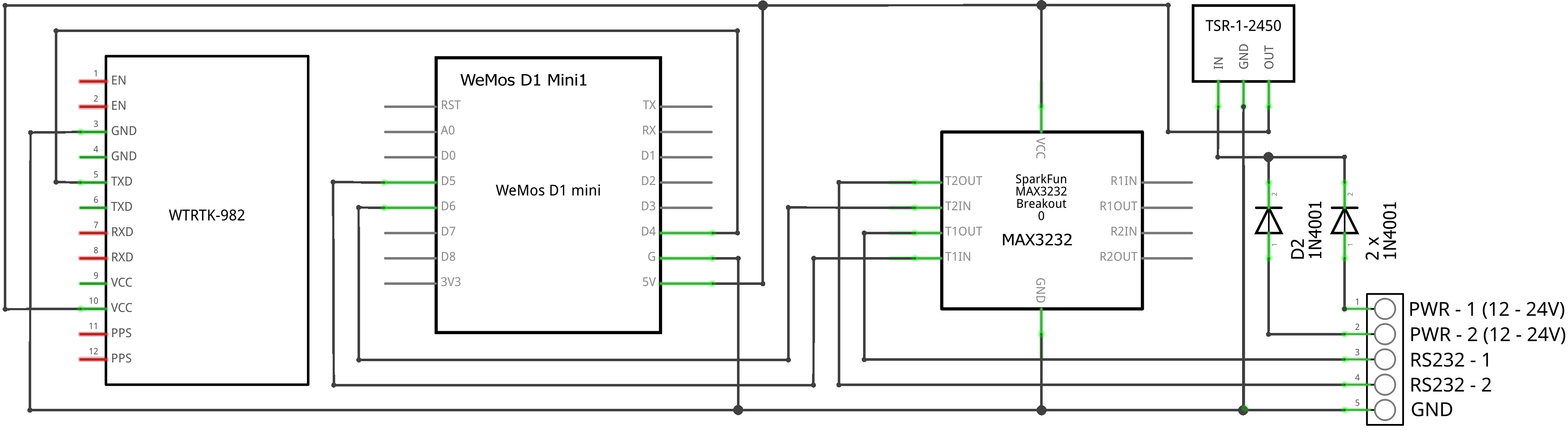
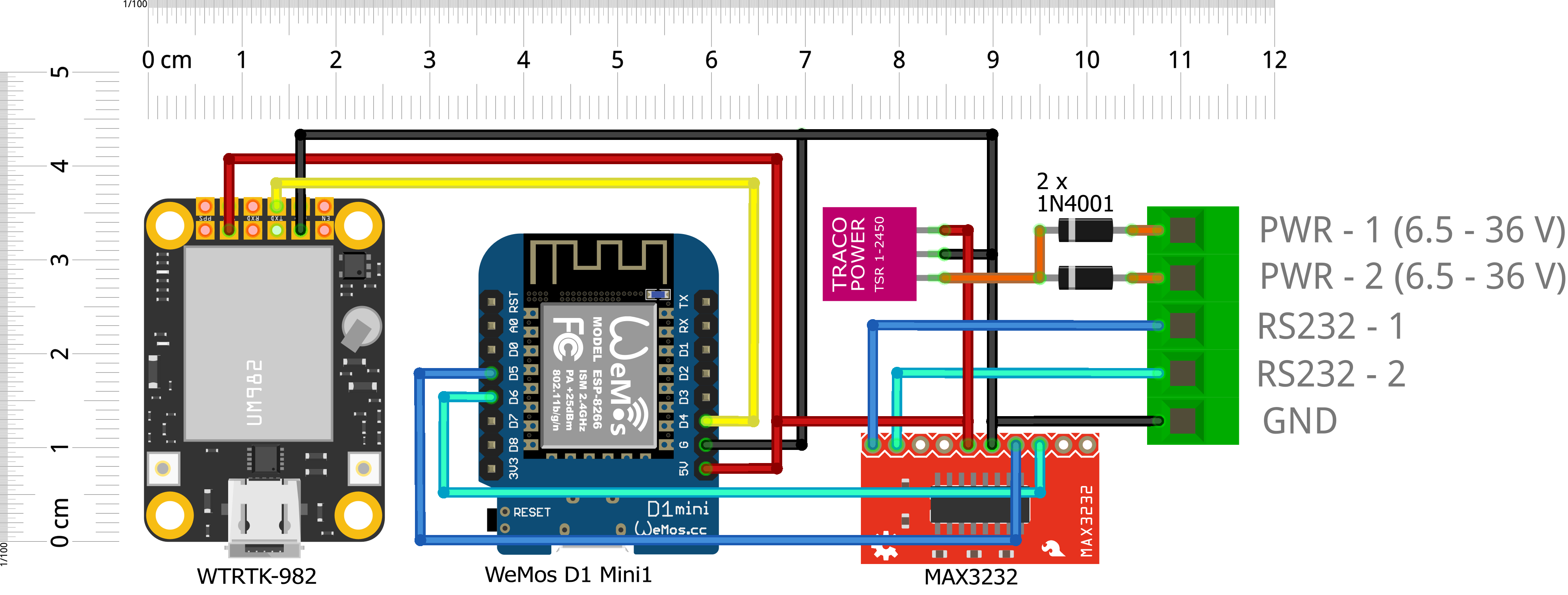
Schaltplan für den GNSS-Kompass.
Und hier schließlich der Programm Code für die Arduino-IDE.
|
|
|
|
|
|

Kompass-Anzeige auf dem Kartenplotter (iSailor-App auf dem iPad). Die Beluga ist hier so am Steg im Braunschweiger Motorboot Club e.V. festgemacht, dass die Schiffsachse parallel zum Rand des Mittellandkanals ausgerichtet ist. Die braune Linie auf dem Navigationsdisplay bestätigt das exakt.